中国研究团队在可展开空间机械臂研究取得进展
近日,中国科学院沈阳自动化研究所空间机械臂领域研究取得了新进展。为应对碎片清除、在轨组装和制造等复杂空间任务,科研团队创新性地研制出一种1U尺寸(10cm*10cm*10cm)的可展开空间机器臂Cubot。相关研究成果以封面形式,发表在Space: Science & Technology上。
科研团队已完成Cubot原理样机的研制,并进行了展开与抓取实验,验证了Cubot的可行性。Cubot由主动关节、被动关节、臂杆和末端执行器等组成,折叠时可收拢于1U的空间尺寸内,展开后为一个带末端执行器的多自由度机械臂,折展比达1比7。Cubot具有两种工作模式:A模式主要用于航天器的在轨维护,而B模式则面向空间碎片的主动清除。
在构型设计方面,Cubot可根据具体在轨任务,灵活调节或定制杆长、被动关节数、末端执行器尺寸等设计参数。在展开过程中,Cubot是一个7自由度机械臂;完全展开后,被动关节自锁,Cubot变成了一个3自由度机械臂外加一个单自由度的末端机械手爪。在工作区域设置方面,Cubot在展开过程和展开后拥有不同的工作区域。
Cubot实现了空间机械臂的模块化、微型化设计,在轨展开后可完成对小型空间碎片的抓取,辅助空间站舱外结构维护等作业任务。
研究工作得到国家重点研发计划等的支持。
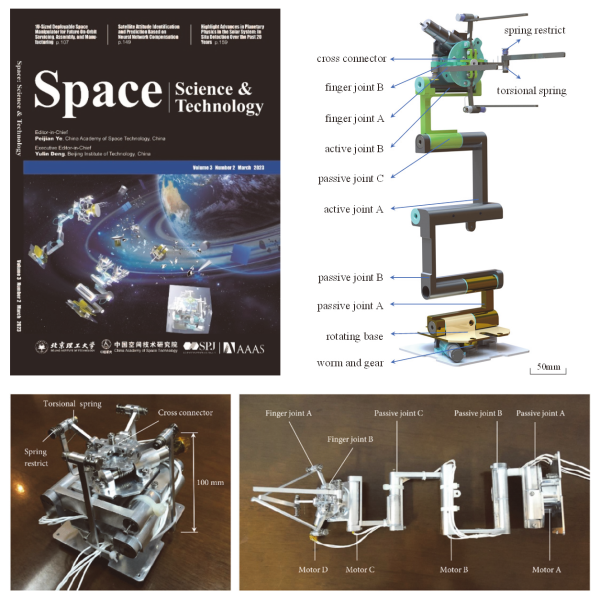
Space: Science & Technology封面与Cubot机械臂
版权声明:除特殊说明外,本站所有文章均为 字节点击 原创内容,采用 BY-NC-SA 知识共享协议。原文链接:https://byteclicks.com/48896.html 转载时请以链接形式标明本文地址。转载本站内容不得用于任何商业目的。本站转载内容版权归原作者所有,文章内容仅代表作者独立观点,不代表字节点击立场。报道中出现的商标、图像版权及专利和其他版权所有的信息属于其合法持有人,只供传递信息之用,非商务用途。如有侵权,请联系 gavin@byteclicks.com。我们将协调给予处理。
赞
查看全文
作者最近更新
-
拉压力传感器在智能家居领域的应用前景展望感知新人类
 02-14 16:15
02-14 16:15
-
又一车企自研自产电池!感知新人类2024-07-04

-
存储芯片价格为何一涨再涨?感知新人类2024-07-02




评论0条评论