松下开发可有效地教授机器人执行准确、安全的动作的技术
日本松下控股公司 (Panasonic Holdings)已开发出一种技术,可有效地教授机器人执行涉及接触的动作。该技术能够有效地传授控制参数,使机器人既能正确执行传授的动作,又能在发生接触时安全地执行动作。
松下控股于2023年8月8日宣布,该公司已开发出一种技术,可有效地教授机器人执行涉及接触的动作。直接示教是指人直接移动机器人以示教其动作,要求机器人准确再现示教动作,同时降低与人或物体接触的风险。然而,要在两者之间取得平衡的控制却极具挑战性。
另一方面,阻抗控制是一种使机器人的动作具有弹簧般灵活性的控制技术,如果弹簧系统(阻抗增益)的参数设置得当,则可以在准确执行示教动作的同时降低接触风险。
然而,在一般的阻抗控制中,很难在安全性和动作准确性之间做出权衡。此外,要完成一项任务,必须准确地完成几个连续动作,如接近门把手、转动把手和开门,但每个动作的最佳阻抗增益却各不相同。
因此,该公司设计了一种两阶段方法。首先对所教的动作序列进行分段,以便于优化参数,然后使用多目标贝叶斯优化法为每个分段找到最佳阻抗增益。
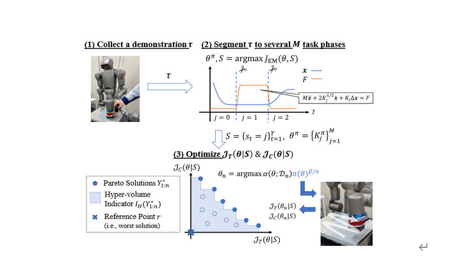
使用开发的方法学习阻抗控制参数的流程
开发的分割方法“IC-SLD(阻抗控制感知切换线性动力学)”假设一系列机器人运动是通过组合阻抗控制假设的弹簧系统的多个运动方程来生成的,作为推断未知的问题方程中的阻抗增益和方程的切换时间。在IC-SLD方法中,由于最小化了实际示教轨迹和预测轨迹之间的差异以获得解,因此与传统方法相比,可以实现适合优化的分割。
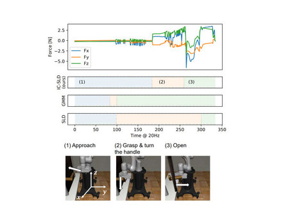
IC-SLD 和传统方法在开门任务中的分割结果
接下来,我们利用先验知识通过贝叶斯优化来搜索阻抗增益。通过使用 IC-SLD 输出的阻抗增益的估计值作为候选解决方案,可以实现有效的优化。使用模拟和实际设备进行的评估表明,与传统方法相比,可以在更短的时间内学习阻抗增益。
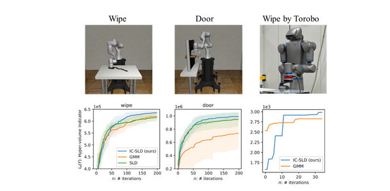
使用所开发的方法通过仿真和实际机器学习阻抗增益的结果。横轴是试验次数,纵轴是综合任务绩效和安全性的指标
查看全文
作者最近更新
-
多模态模型赋能智能终端,AI传感成关键硬件科技星球
 03-23 16:37
03-23 16:37 -
半导体式气体传感器:对电路板产生异味气体检测,避免发生火灾科技星球01-12 19:14
-
如何创新印刷电子技术提高制造智能传感器的性能和稳定性?科技星球2024-11-18




评论0条评论