智能驾驶迎来第三次技术跃迁:卓驭科技引领移动物理AI新纪元
 科技先生
科技先生
智能驾驶迎来第三次技术跃迁:卓驭科技引领移动物理AI新纪元
2026年4月27日,北京车展期间,卓驭科技正式发布了其原生多模态基础模型,并宣布该模型已进入跨行业、大规模量产应用阶段。这一进展标志着全球智能驾驶领域正从“数据驱动的端到端”迈向“物理智能驱动”的新阶段。
当前,业内普遍认为智能驾驶已历经“规则驱动”(1.0)和“场景数据驱动”(2.0),正在迎来以“物理智能”为核心特征的第三次技术范式转变。卓驭科技的原生多模态基础模型,被认为是这一转型进程中的首个系统性技术成果。

技术突破:AI首次内化物理世界的通用原理
当前主流的端到端智能驾驶方案,本质上仍属于“行为统计模型”。它们依赖于大量驾驶视频进行训练,通过统计驾驶行为的相关性进行决策,但并未真正理解其背后的物理因果逻辑。这种模式在面对超出训练数据分布的罕见场景时,可靠性明显下降。
卓驭的原生多模态基础模型则彻底重构了训练逻辑。其训练输入不仅包括驾驶场景,还覆盖了广泛的多模态数据,包括网络上的物理交互视频、各类移动机器人运行记录以及全球主要国家的交通法规文本。借助统一的表示框架,模型能够自主学习并内化诸如惯性、摩擦力、碰撞代价、路权优先级等物理世界的通用规则。
这种能力使得车辆在遭遇未曾见过的施工改道、极端天气或非常规障碍物时,能够基于物理常识进行实时推理和决策,而非依赖过往案例。据卓驭内部测试结果,在典型长尾场景中,该模型的表现较上一代端到端系统提升了40%以上。
该模型的核心优势被概括为“Zero Shot零数据知识迁移”,具体体现在三个方面:
- 跨垂类即插即用:同一模型无需额外训练,即可适用于乘用车、重卡、客车及物流车辆等不同类型。
- 全球化适应性:预训练中融合全球交规和驾驶习惯,极大降低了海外部署的适配成本。
- 全场景通用性:模型适用于铺装与非铺装道路、室内外环境,甚至已拓展至低空无人机领域。

量产验证:130余款车型落地,34家客户合作
与许多仍停留在实验室阶段的前沿技术不同,卓驭的原生多模态模型已在多个应用领域实现规模化落地。
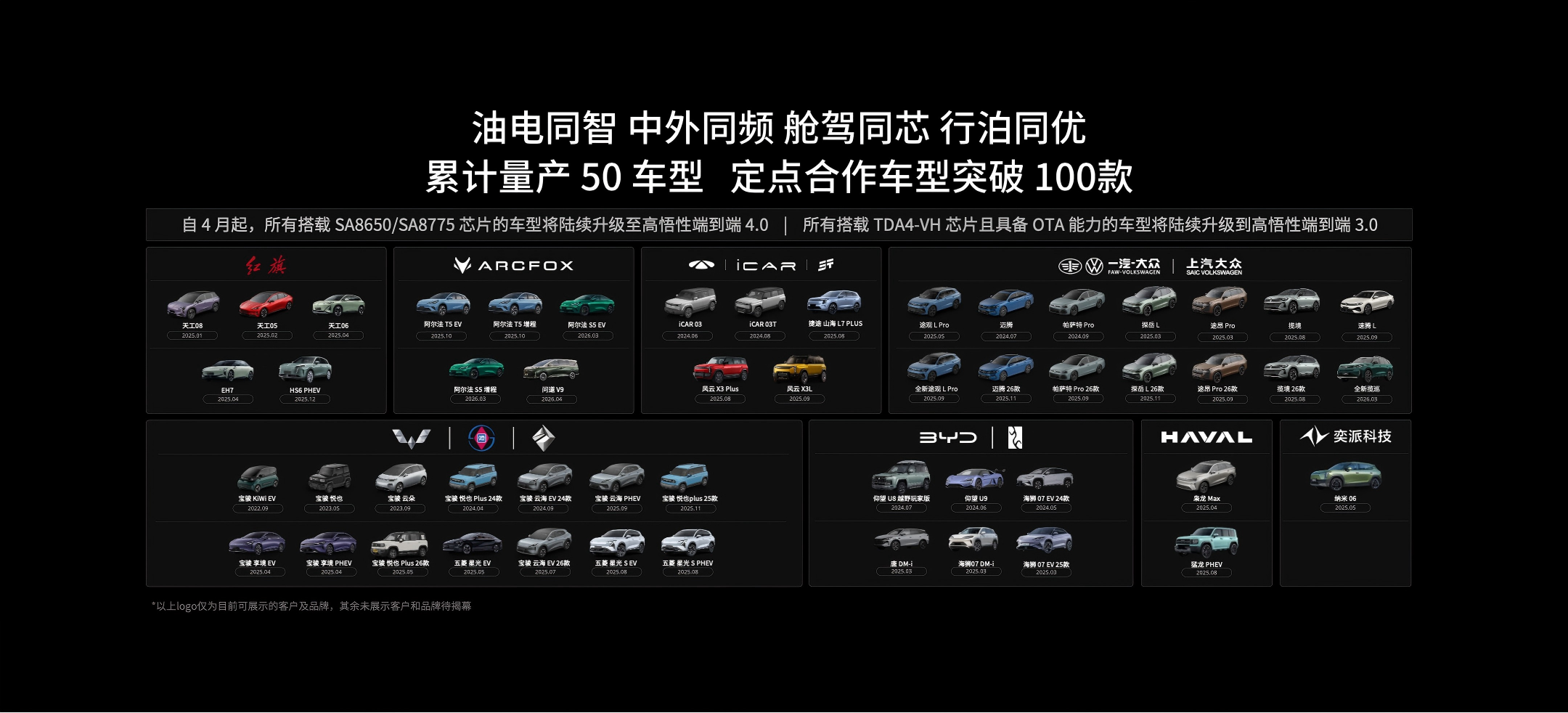
在乘用车领域,卓驭已累计实现超过50款量产车型,另有100余款车型进入定点阶段,覆盖传统燃油车与新能源车、舱驾一体化系统、全场景智能驾驶等多个方向。高悟性端到端4.0系统于2026年4月起通过OTA方式逐步推送,而基于原生多模态模型的下一代智能驾驶系统则已在红旗天工S概念车上率先部署。
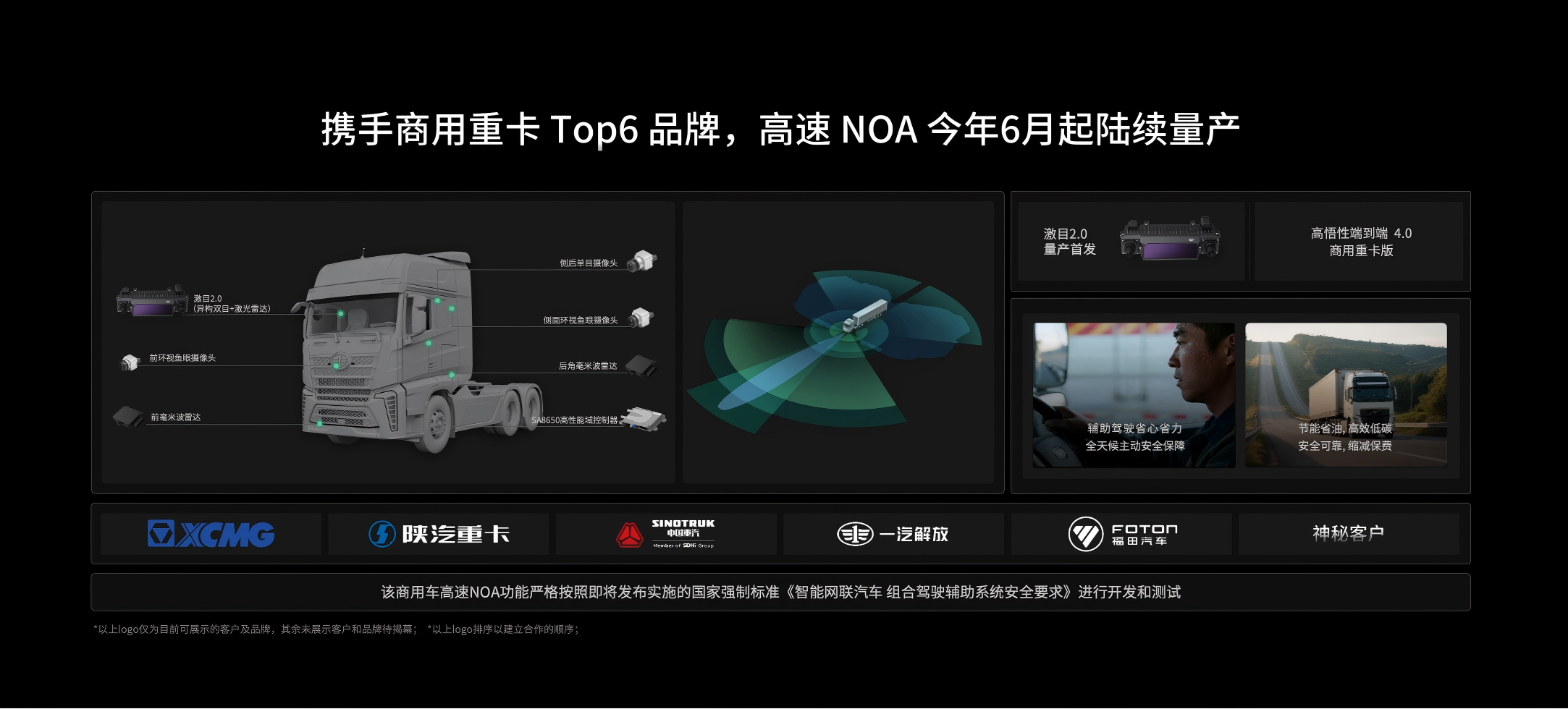
商用车方面,卓驭与中国重汽、一汽解放、陕汽、东风等六大重卡头部企业均建立了合作关系。其自主研发的激目2.0舱内激光与视觉融合系统,结合原生多模态模型,使重卡NOA在安全性与能耗效率方面取得突破。相关车型计划于2026年6月开始批量交付。
此外,卓驭与宇通客车联合开发的NOA方案预计于9月量产,覆盖高速、城市及自主泊车场景。
在无人物流与Robotaxi领域,无人物流车将于2026年7月启动试运营,Robotaxi也将在下半年进入试运行阶段。两款产品均基于原生多模态模型与自研L4级三余控制器(双NVIDIA Thor芯片)。
低空领域同样进展迅速,卓驭后装车载无人机预计将于第三季度实现量产,进一步拓展其“天地一体”的智能出行生态。
截至目前,卓驭已与34家客户展开合作,涵盖130余款车型,成为智能出行行业首个在多垂类、多场景实现大规模商业落地的科技企业。
产业价值:重塑成本结构与全球化能力
卓驭科技CEO沈劭劼在发布会上指出,当前基础模型的训练成本已达到每年数十亿元的规模。唯有通过将同一模型应用于尽可能多的移动平台,才能有效分摊成本、推动商业模式正向循环。“智能驾驶企业最终都必须转型为移动物理AI公司,这不是战略选择,而是生存逻辑。”
行业观察人士认为,卓驭原生多模态模型的推出,实质上重构了智能驾驶的成本结构——虽然训练成本高昂,但边际成本几乎趋零,从而带来了前所未有的规模效应。同时,其“全球零泛化”能力显著降低了中国智能驾驶方案进入海外市场所需的本地化适配成本,从“数十人月”压缩至“数人周”,为行业全球化铺平了关键路径。
在2026年北京车展现场,卓驭开放了基于NVIDIA Thor平台、11V视觉系统与激目2.0的原生多模态模型实车体验。据悉,该模型将于2026年内正式部署于乘用车与商用重卡,并作为卓驭智能驾驶海外拓展的核心技术支撑。

查看全文





评论0条评论