简介
MEMS 电容式加速度传感器和振动环技术可作为 6 个自由度系统
ASG 模拟惯性测量单元是基于在单外壳中集成的三台加速度传感器和 三台陀螺仪。模块化概念允许调整所有 IMU,以适应应用的确切要求。 两种不同的加速度传感器系列(低噪和中频)可用,且可选择并结合 加速度传感器和陀螺仪的最佳测量。微机械硅结构的设计使 IMU 对外 部冲击和振动极其敏感。因此,它们非常适合在恶劣的环境条件下使 用。
描述
ASG IMU 7 具有产生工业级性能的高偏置稳定性和低角度随机游走的 特点,可用于检测最小线性加速度和角速率。低噪(LN)加速度传 感器具有优异的噪声性能( 7-50 μg/√Hz),而中频(MF)加速度传 感器提供了宽频响应,范围为 0-4.5 kHz(±3 dB)。集成电子电路有 助于确保所有 6 个自由度的独立模拟电压输出和灵活的电源电压(5 (LN)或 6(MF)-40 VDG)。
IMU 具有轻量级、可靠的铝制外壳,保护等级为 IP65,以及带可配置 长度和接头的可拆卸接头电缆。
特点
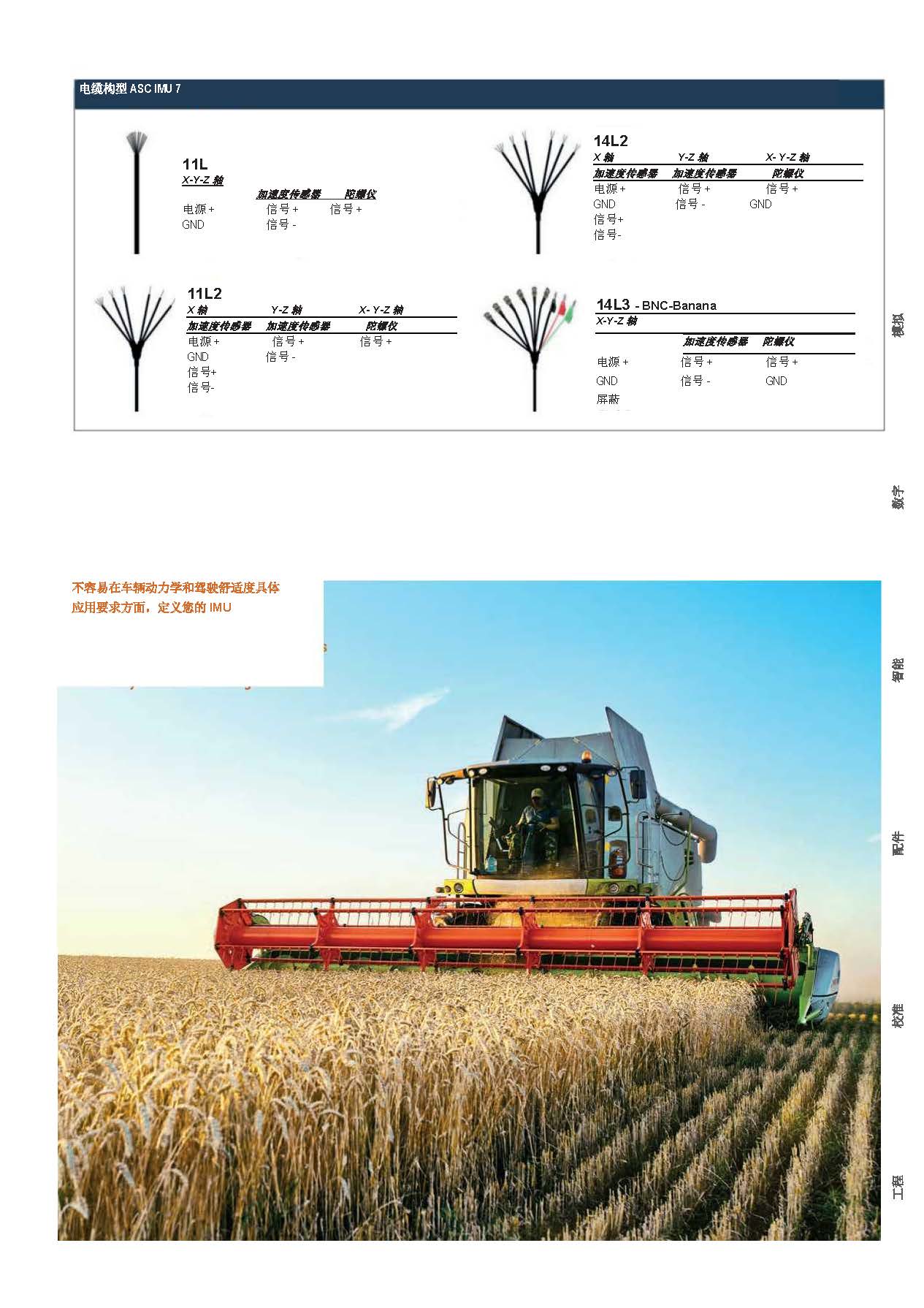
应用
该系列陀螺仪优异的偏置稳定性允许其用于以下应用,如陀螺罗盘、姿态航向参考系统 AHRS 或水下遥控航 行器(ROV)的定位。此外,作为惯性系统的组成部分,陀螺仪能够在许多应用领域中实现高精度位置测量 和舰桥导航,如自动驾驶车、船舶制导和控制、机器人、轨道车辆或飞机系统。
技术参数
| 规格项 | 参数值 |
|---|---|
| 重量 | 26 g |
| 温度系数比例因子 | ±200(最大值)(传感器) |
| 灵敏度 | 54-2000 mV/g(传感器),1.1-13.2 mV/g(陀螺仪) |
| 频响范围(±5 %) | 0-1600 Hz(传感器) |
| 量程 | ±2 g 至 ±50 g(传感器),±75 至 ±900 °/s(陀螺仪) |
| 温度范围偏差(偏置) | ±1.0 (典型值)| ±3.0(最大值) °/s |
| 温度系数偏移(最大值) | ±0.8 至 ±20 mg/K(传感器) |
| 温度范围误差比例因子(陀螺仪) | ±0.5 (典型值)| ±1.5(最大值) % |
| 噪声密度 | 7-170 μg/√Hz(传感器),0.018(典型值)| 0.025(最大值) °/s/√Hz (陀螺仪,速率噪声密度) |
| 冲击极限 | 2000-5000 g(传感器),500 g (运行中, 1 ms)| 10000 g (陀螺仪,充电中, 0.1 ms) |
| 带宽(陀螺仪) | 150 Hz |
| 偏置稳定性(陀螺仪) | 12 °/hr |
| 外壳材料 | 铝 |
| 角度随机游走(陀螺仪) | 0.2 °/√hr |
| 工作温度 | -40 至+85 °C |
| 保护等级 | IP65 |
| 振幅非线性度 | <0.15(典型值)| <0.5(最大值) % FSO(传感器),<0.06(典型值) | <0.15(最大值) % FSO(陀螺仪) |