激光位移传感器的光学系统设计
摘要:针对目前国内自主研制的激光位移传感器精度低,测量范围小等问题,提出了一种采用光学设计软件预先仿真整个激光位移传感器光学系统的方法。在分析系统各部分的光学特性的基础上,结合具体要求设计了一个激光位移传感器的光学系统,其工作范围为(50±10)mm。采用系统分割的方法,将整个光学系统分为两部分进行设计,第一部分是激光束的整形透镜,要求在有效的工作范围内得到小而均匀的出射光斑,设计结果表明,在测量范围内,光斑大小能够控 制在10-1mm量级;另一部分是被测面散射光接收的成像物镜,该系统的特点是物面和像面相对于光轴都有一定的角度,实验结果表明其成像满足Scheimpflug条件。
关键词:激光位移传感器;激光三角法;整形镜;成像透镜;光学设计
1.引言
随着现代化工业的发展,激光位移传感器作为高精度、高响应的非接触测量仪器,在光电技术检测领域得到了广泛的应用。其采用的激光三角法原理在理论上已相当成熟,但在实际应用中还有一定的困难。由于三角法建立在理想成像的基础之上,所以三角法能否准确实现还要依赖于所采用的光学系统。现阶段,国外此类的高精度物镜设计处于领先水平,并拥有比较成熟的产品,但其多透镜组合与非球面的加工方式在制造成本上相当昂贵。国内对激光位移传感器光学系统的研究主要还处于实验性阶段,尚没有形成产品化。针对目前市场上对激光位移传感器的广泛需求,本文从简单实用的角度出发,利用CODEV光学设计软件对激光三角法进行实际光路模拟与优化设计,形成了一整套具有优良成像特性的光学系统,为传感器的产品化生产提供了理论依据。
2.激光三角法的基本光路
激光位移传感器根据入射光角度的不同可分为直入射式和斜入射式两种[1],本设计采用的是直入射式,其光路结构如图1所示。整套光路可以分为两部分,即整形系统和接收系统[2]。左边部分是光束整形系统,其作用是将激光器发出的光束汇聚在工作范围内,使汇聚的光斑尽量小而均匀。光源为半导体激光器(LD),它经整形系统在测量范围50±10mm内形成均匀的光斑。后面则是光束接收系统,它将物体表面的漫反射光汇聚到光敏探测器上,使其精确成像。图中α为被测面与成像透镜光轴夹角,β为光敏探测器与光轴的夹角,do和di分别表示物距和像距。
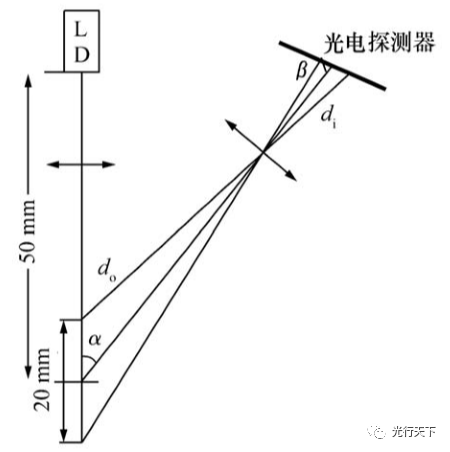
1.直入射式激光三角法结构示意图
3.光学设计
3.1整形镜设计
激光位移传感器的测量精度容易受到被测物体表面特征的影响,为了减小测量误差,在整形镜设计中应尽量使出射光斑在有效的测量范围内实现光斑小且均匀。针对传感头小型化设计的要求,半导体激光器体积小、重量轻的优点正好符合这一要求,但其光束质量并不理想,需要对其进行光束整形。半导体激光器快慢轴的光束分布极不对称:快轴发散角较大,半角的典型值为30~40°,光束呈高斯分布,发光范围的半宽度为0.6~0.8μm,慢轴发散角的半角典型值为3~6°,光束分布不规则,发光范围半宽度为50~100μm。因此,在不允许能量损失的情况下,要求整形系统的物方数值孔径(NA)>0.573;但由于光束的快轴能量呈高斯分布,通常取半宽度(FWHM)为20°,此时NA=0.342。系统物距应尽量小一些,但考虑到工艺问题,不宜过小,选定为2.5mm。为了便于设计,将系统倒置,整个系统的主要要求为:工作波长为785±10nm,像方NA=0.342,像距l′=2.5mm,物距l=40~60mm,焦距f=3~4mm。
要想在工作范围内得到好的光斑质量,可采用柱面镜或非球面实现,另外波前编码和切趾法在延拓焦深方面也有很好的效果[3,4],但这样的光学系统相对较复杂,元件较多,不宜装调,成本也会大大提高。因此,在精度允许的情况下,可考虑全部采用球面镜,不考虑焦深延拓,用变倍的方法实现在40、45、50、55、60mm物距处光斑大小尽量均匀一致。根据光谱分布,设定中心波长权重为3,边缘波长权重为1。要消掉少量的色差,系统至少需要两片镜片。根据以上要求选定了一个初始结构,经过优化得到以下最优设计结果。图2为优化后的镜头结构(像距在50mm处)。表1为有效工作范围内轴上视场的光斑大小分布。
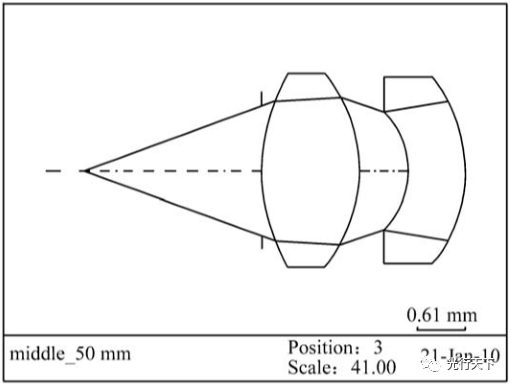
图2.优化后的镜头结构
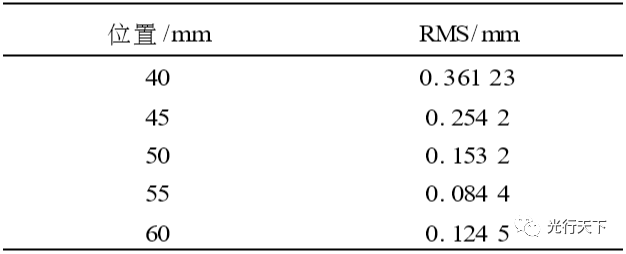
表1.光斑大小分布
从图2的镜头图可以看出,第二块透镜的半径很小,主要是为了保证系统在整个工作范围内得到相对均匀的光斑。表1给出了在工作范围内光斑的直径大小,最大为0.4mm,在靠近透镜的一边,最小为0.08mm,在55mm处。由于成像系统的入射光是整形部分光经过物体散射回去的,因此整形系统得到的光斑不能太小;同时为了保证精度要求,光斑也不能太大,上面的结果能够满足需求。
3.2成像透镜设计
得到好的出射光斑以后,如何接收物体表面的散射光并使其精确成像,是确保激光位移传感器精度的关键问题。在直入射式三角法测量中,物体沿激光入射方向移动,物面并不垂直于成像光轴。那么在透镜成像过程中(如图1),由几何成像公式可证明:
 (1)
(1)
即为理想成像的Scheimpflug条件[5]。要想达到理想的成像效果,光电探测器需依此条件放置。根据物体表面的散射特性,可确定入射光与成像透镜光轴的夹角。激光入射到被测物体表面,散射光强度成椭球型分布[6]。当入射光垂直入射时,α值越小,成像透镜接收到的散射光强度越大,但角度过小对探测器分辨率要求及制作工艺上都有较高难度,综合考虑取α值为21.8°,由仪器的测量范围±10mm可得到物距为53.85mm。通常情况下,库克三元组有很好的成像效果[7],因此选择库克三元组作为成像透镜的初始结构进行优化。优化过程中以各个镜片表面的半径为变量,控制厚度在适当范围,同时将像面与光轴的夹角β设为可变,采用CODEV的横向像差与波像差相结合的方式进行优化,得到下面的结果。图3为优化后的成像光学系统。
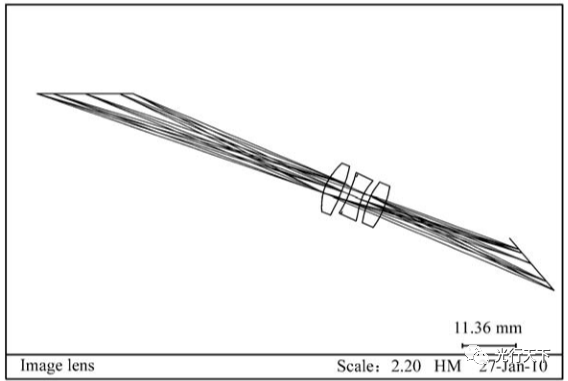
图3.优化后的成像光学系统
从图3所示的成像光学系统结构图可看出,在整个物面并不垂直于光轴时,经过系统成像以后得到的像面也不垂直于光轴,与光轴存在一定的夹角β,设计的最终β优化值取为60.4628°,此时像面上可得到比较理想的光斑分布。在工作范围内不同视场的散射光均能很好地成像于探测器。在图4中可看到不同视场的成像光斑形状,此点列图表明成像光斑分布均匀,但还存在一定的剩余像差,主要为球差,光斑大小可见表2,光斑直径在20μm左右。同时根据设计结果可得像距为33.092mm,经计算tanα/tanβ=0.6137,di/do=0.6145,此物镜设计基本满足于Scheimpflug理想成像条件。
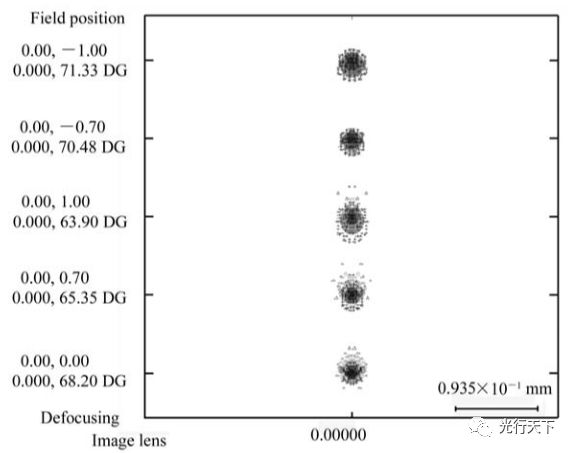
图4.成像光斑形状
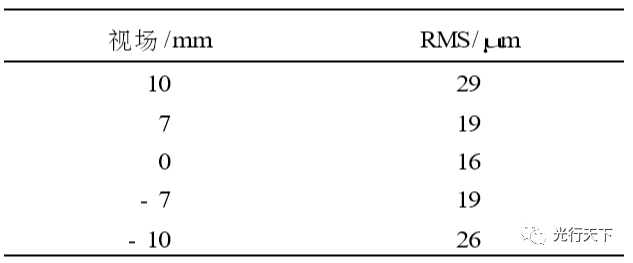
表2.像面上的光斑大小分布
4.结论
本文在理论分析的基础上,采用CODEV光学设计软件对激光位移传感器的整套光学系统进行了分块模拟,高质量地完成了对半导体激光器的光束整形及散射光的精确接收。该系统体积小、结构简单、装调方便;一体化的球面镜设计,使生产成本大幅度降低,具有很好的应用前景。实际结果表明,该系统具有较高的可行性。
参考文献
[1]冯俊艳,冯其波,匡萃方,等.高精度激光三角位移传感器的技术现状[J].应用光学,2004,25(3):33-36.
[2]陈骥,王鑫,曹久大,等.高速CCD激光位移传感器[J].光学精密工程,2008,16(4):611-616.
[3]GOODMANJW.傅里叶光学导论[M].秦克诚,刘培森,译.北京:电子工业出版社,2006.
[4]雷广智,张新,张建萍,等.波前编码系统的新设计[J].光学精密工程,2008,16(7):1172-1176.
[5]邹振书,李喜增,张景和,等.非接触测量激光光学探头[J].光学精密工程,1997,5(3):83-88.
[6]蔡明知,宋洪侠,曹铁泽,等.基于PSD的高精度激光位移传感器设计与分析[J].机电产品开发与创新,2007,20(5):150-152.
[7]毛文炜.光学镜头的优化设计[M].北京:清华大学出版社,2009.
+ 扫一扫,关注光行天下公众号,目前已有1.5万人关注!+

广告合作:请加微信号 cyqdesign
光行天下综合交流QQ群:23899225
光行天下产品宣传QQ群:955906669
光行天下:http://www.opticsky.cn
人才天下:http://hr.opticsky.cn
团购天下:http://tuan.opticsky.cn
查看全文
作者最近更新
-
激光位移传感器的光学系统设计光行天下
 05-10 13:31
05-10 13:31 -
激光传感器的测距方法及其优势光行天下2024-07-19
-
光纤激光水听器研究进展光行天下2022-08-25




评论0条评论