人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)
 感知论坛
感知论坛
在人工智能与机器人技术飞速发展的浪潮中,人形机器人正从科幻概念逐步走向现实应用,成为全球科技竞争的新焦点。而传感器作为人形机器人的“感官”,是其实现智能交互与复杂任务执行的关键硬件基础。从感知外界环境的视觉、触觉、力觉,到维持自身平衡与定位的惯性测量等,各类传感器的性能与技术进步直接决定了人形机器人的智能化水平与应用场景拓展能力。当前,人形机器人传感器行业迎来发展机遇,政策支持、资本涌入、AI大模型助力及广泛应用场景拓展推动其发展。但行业也面临技术提升、成本降低及国际竞争等挑战,国内企业需加快技术创新,实现国产化替代。
本文将深入剖析人形机器人传感器行业,从驱动因素、细分领域、市场规模到相关公司布局,全方位梳理行业现状与未来发展趋势。探讨各细分领域的技术路线、市场格局等内容。同时,聚焦行业内具有代表性的企业,分析其技术优势、市场地位与战略布局,为读者提供一份详尽的参考,助力行业健康发展,推动人形机器人技术迈向新的高度。
01
行业概述
1、传感器是机器人实现智能层级跃迁的硬件基石
传感器是感知世界的首要工具。传感器与通信、计算机被称为现代信息技术的三大支柱,其主要功能是将各种物理量、化学量等待感知量转换为可检测与数字化的电信号。
人形机器人通过传感器获取外界状态和自身状态。机器人代替人类工作时需要模拟人类的“感知-决策-执行”,在感知环节,传感器如同机器人的感官(如:眼、耳、皮肤等),负责感知外部环境(如:压力、图像)与自身状态(如:位置、速度、加速度)。

传感器系统是机器人必备组成部分。感知系统在机器人工作的各环节发挥作用,以物流搬运机器人为例,定位传感器感知机器人当前位置,并在行驶过程中通过感知位置保证行驶路线正确,压力传感器监控搬运力度,视觉传感器探测障碍物。
传感器作为人形机器人智能化层级的核心硬件载体,其技术迭代直接驱动智能等级跃迁。在人形机器人智能化等级从L1至L3的升级过程中,传感器系统发生阶跃式演进:L1级依赖基础视觉传感器实现简单操作;L2级通过力传感器实现物体抓取;L3级整合电子皮肤与高精度力反馈,实现与复杂环境交互。
2、方案:力、触觉、IMU、视觉传感器为主流方案
内部传感器方案较成熟,外部传感器具备较大增配潜力。人形机器人上使用传感器大致可以分为内部和外部两类:1)内部传感器是运控反馈系统的关键,对精细操作和柔性控制的需求催生高级别传感器的需求,包括位置、速度传感器、编码器等,基本可以沿用工业机器人/协作机器人的成熟方案;2)外部传感器是对外智能交互的核心硬件,主要为视觉、力觉、温度和触觉传感器等,增配潜力较大。
远期看随着多模态感知与交互的发展,听觉、语言交流、味觉、嗅觉等多元传感系统有望增加:
关节处的位置/速度/力传感器主要的作用为针对关节的运用状态、输出力或力矩进行监测和反馈,一般可采用编码器或者一维力/力矩传感器,若要更突出的复杂场景柔顺控制能力则可以在脚部/手腕等处增配六维力/力矩传感器,例如特斯拉Optimus;
本体的惯性传感器,可以采用加速度计/陀螺仪,精度要求更高则可以增配IMU,主要用于协助身体平衡、定位导航等功能。
灵巧手触觉传感器,主要用于获取如接触力大小和方向、温度、湿度、形状纹理等信息,对非结构化环境中的稳定抓取、路径规划和避障等至关重要。当前主要包括MEMS压力阵列触觉传感器和柔性电子皮肤两种方案,均处于产业发展前期。
视觉传感器,主要用于物体的识别和跟踪、环境感知,同样是路径规划的基础。得益于移动服务机器人发展,3D主动视觉的视觉SLAM有了一定的发展基础,大部分人形机器人厂商沿用方案。特斯拉Optimus则使用车端自动驾驶的视觉方案,即通过摄像头+FSD计算平台。

02
驱动因素
1、人形机器人具备中长期潜力,市场空间广阔,推动硬件发展
中长期来看,人形机器人赛道正展现出极具爆发力的发展潜力,具备广阔的市场空间。国内自上而下的政策支持、多渠道资本的持续护航、AI大模型的赋能以及广泛应用场景对商业落地化的推进,驱动了人形机器人产业发展。
1)政策支持:国家层面,2023年10月工信部发布《人形机器人创新发展指导意见》,提出到2025年初步建立创新体系、突破关键技术,到2027年形成安全可靠产业链供应链体系,综合实力达世界先进水平。地方层面,北京、上海、广东、江苏等地纷纷响应,出台相关政策,推动机器人产业规模化、专业化发展。
2)资本助力:人形机器人产业具有长周期、高技术密集度与生态依赖性等特点。2022年初至2024年Q1,中国人形机器人领域共发生25笔融资,融资规模43.75亿元。2025年8月31日,优必选与InfiniCapital签署10亿美元战略伙伴合作协议。湖北省设立100亿元人形机器人产业投资母基金,北京市设立总规模1000亿元、存续期15年的政府投资基金,重点支持人工智能、机器人等领域。
3)AI大模型突破推动人形机器人智能化预期。近两年来,人工智能大模型技术快速迭代,有望为人形机器人的产业落地提供重要的技术支撑。在技术驱动层面,AI大模型赋予人形机器人“最强大脑”,在人-机-环境交互方面,大模型可以接受视觉、语言、触觉等多种信息输入,提升自然语言处理、视觉感知、动作规划等核心能力。国外科技大厂如谷歌2022年推出RT系列模型并多次迭代,英伟达2024年3月发布GR00T项目,2025年8月末发布JetsonThor开发套件及量产模组;国内智元2025年3月发布智元启元大模型(GO-1),银河通用2025年1月和6月分别发布GraspVLA与TrackVLA等。
4)应用场景拓展:人形机器人有望广泛应用于工业制造、仓储物流、民生服务及特种应用领域。近两年商业化落地进展持续推进,如Figure01进入宝马工厂实训,优必选WalkerS1走进比亚迪等汽车工厂,宇树科技人形机器人应用于研究、教育和消费领域等。中长期来看,人形机器人有望从ToB场景延伸至ToC场景,拓展广阔市场空间。
总体来看,人形机器人市场前景广阔,有望在2025年实现量产。在政策支持与长期资本的持续护航下,市场对人形机器人规模化应用的迫切需求正倒逼核心零部件的发展与国产化进程。通过技术迭代与供应链优化持续降低硬件成本;同时,AI大模型的快速发展为机器人“大脑”的泛化能力提供支撑,进一步拓展其在工业、服务、特种等多元场景的应用边界,而应用场景的持续丰富又将反向刺激硬件需求的增长,推动传感器、执行器、结构件等核心硬件向高性能、低成本、高可靠性的方向快速演进,形成“市场扩容-硬件降本-场景拓展-需求升级”的良性循环,为人形机器人的大规模商业化奠定坚实基础。
2、人形机器人产业链:上游核心零部件价值量占比较高,业绩兑现较快
人形机器人产业链由上游零部件供应、中游本体制造与集成、下游多元应用领域三大板块构成。上游零部件主要包括决策控制系统、感知系统、运动执行系统和其他零部件等,其中从当下看,价值占比高、增量空间大的主要是传感器、减速器、电机、丝杠等核心零部件。中游本体制造与集成主要负责整机的设计、组装和测试,以及将上游零部件和中游本体进行整合,此环节当前利润空间相对较小,但随着技术成熟和规模化生产,未来具有较大的弹性。下游应用领域,人形机器人未来有望广泛应用于制造、物流、医疗、教育、家庭陪护等多个领域。
当下,传感器、减速器、电机、丝杠等上游核心零部件价值量占比较高,目前具备技术壁垒和场景落地能力的上游零部件企业也是业绩兑现较快的环节。

3、政策支持传感器发展
近年来,在全球科技竞争加剧、中美贸易摩擦等背景下,关键科技领域实现国产替代,解决“卡脖子”问题成为维护国家安全的关键,中央及地方政府积极出台政策支持热敏电阻及传感器等电子企业,行业政策宽松,给国内热敏电阻及传感器企业带来了良好的发展机遇、广阔的发展空间。

03
力/力矩传感:人形机器人高精度交互的关键
1、力传感分类:人形机器人力控方案的技术选型与维度考量
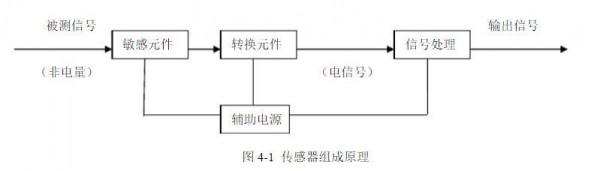
力传感器主要将力学信号转变为电学信号。敏感元件直接感受(或响应)被测信息(非电量),转换元件进一步将敏感元件的感受(或响应)信号转换为电信号,其具体作用包括:1)把来自敏感元件的信号转移成电压、电流等信号,使其更适合进一步处理和传输;2)对信号进行滤波、调制、解调、衰减、运算及数字化处理。
力感知是人形机器人运动控制的基础,力/力矩传感器为主流力控方案。力感知为人形机器人的运动控制提供必要的力觉信息,对机器人完成复杂、精细作业任务,实现柔顺化、智能化操作起到关键作用。其中,电流环与力/力矩传感器与机器人力感知的主要方式,与电流环的间接力感知相比,力传感器能够提供更为直接和准确的环境交互信息,外力感知能力相对更敏锐。
力传感器存在多种分类方法,可按工作原理、贴片材料、测量维度、信号传输方式等划分不同类型。
按工作原理划分,力传感器主要包括应变式、压电式、电容式与光电式。其中,应变式力传感器因其高精度、宽测量范围、良好的线性度和成熟的制造工艺成为人形机器人力控的主流方案。相比之下,电容式传感器易受电磁干扰,压电式传感器仅适用于动态测量(静态信号衰减),而光学式传感器虽精度高但成本昂贵且系统复杂,限制了其广泛应用。
硅/金属箔电阻应变传感器性能更优秀,后续有望在人形机器人领域推广。经过对不同类型的力矩传感器在稳定性、刚度、动态特性、成本与信噪比五个维度的综合比较,硅/金属箔电阻应变式传感器在稳定性、刚度以及信噪比等方面展现出显著优势,后续有望在人形机器人领域推广。
按测量维度划分,力传感器可分为一维力/力矩传感器、三维力传感器和六维力传感器。一维力/力矩传感器仅测量单一方向的力或力矩;三维和六维力传感器可同时测量多方向力,其中六维力传感器位列工信部十四五“机器人关键基础提升行动”之列。
一维力传感器:一维力传感器在工业应用广泛,但在机器人使用中,若控制不好易产生振动,且量程受限。市场一维力传感器单价在100-2000元不等,应用在称重仪器、铁路检测等。
三维力传感器:1)力F的作用点P始终与传感器的标定参考点O保持重合;2)力F方向在三维空间随机变化,选用三维力传感器。市场三维力传感器单价在100-10,000元不等,用在实验室检测或部分自动化场景。
六维力传感器:1)空间中任意方向的力F的作用点P不与传感器标定参考点重合;2)力F方向在三维空间随机变化,选用六维力传感器。六维力传感器大幅提升机器人末端感知水平,是高端人形机器人、打磨作业的协作机械臂腕部、仿生手的核心部件。成本相对高昂,售价在3,000-30,000元不等。
综合成本与测力应用,一/三/六维度力传感器均可广泛应用于人形机器人。一维力/力矩传感器测力维度单一,适合单一运动方向场景,例如直线或旋转关节,尽管难以满足高精度任务,但是低成本、易集成;六维力传感器提供全方位力觉反馈,用于复杂作业场景的手部末端力控;三维力传感器往往作为低成本环境下六维力传感器的补充,二者存在一定替代关系。参考特斯拉Optimus和优必选WalkerX的传感器方案,预计人形机器人单机大概率搭载六维力传感器2或4个(少数人形机器人厂家用三维力传感器代替),其余28个关节普遍标配一维力/力矩传感器。

按信号传输方式划分,力传感器输出模式主要分为模拟输出和数字输出两种。模拟输出即输出连续变化的电压或电流信号,信号大小与受力成正比,适用于短距离、低成本、精度要求不高的场景;而数字输出则输出离散的数字信号,通过通信协议(如I2C、SPI、RS485)传输,数字信号包含受力大小、单位、状态等信息,适用于长距离、高精度场景,如机器人、医疗设备、航空航天等领域。能够认为,人形机器人复杂的运动控制需求更适合数字信号传输方式,有效抵抗长距离传输中的信号干扰,确保多关节协同运动时的实时性。
2、产业链及竞争格局:上游弹性体与应变片至关重要,中游ATI份额领先
力/力矩传感器行业产业链上游主要由原材料(金属材料、半导体材料、有机材料等)及关键部件(弹性体、应变片等)组成;中游为传感器的加工制造和封装检测;下游应用领域广泛,工业自动化为主,人形机器人、汽车等行业需求加速增长。
产业链上游来看,弹性体和应变片性能至关重要。从成本结构来看,上游原材料在生产成本中占据重大比例,据传感器专家网,以国内终端产品为例,目前材料成本合计占比约40%(其中20%弹性体、10%应变片、5%封装材料)。从功能作用来看,原材料进一步加工成为弹性体和应变片,是力传感器的核心组成部件。合理的弹性体结构设计使得不同方向的受力性能达到最佳,减少耦合从而提高传感器的测量精度;高质量的应变片更能准确将弹性体的微小应变转换成电信号输出,具有更高的灵敏性和稳定性。
产业链中游来看,行业集中度高,美国ATI份额领先。重点聚焦六维力传感器市场格局,据中商情报网,2024年中国六维力传感器市场中,国外企业市场份额约70%,其中ATI(美国)为行业龙头(市占率22.4%);国内企业合计占30%份额左右,其中宇立仪器市场份额为12.2%,较为领先,蓝点触控、坤维科技和鑫精诚等国产公司市场份额仅居其后。
六维力传感器高端应用仍由欧美主导,国产在串扰方面存在进步空间。从参数对比来看,欧美高端品牌(如美国ATI、德国ME)在串扰(0.3%-0.5%FS)和精度(0.5%FS)上表现优异,技术成熟度高;而国内厂商(如坤维科技、宇立仪器)在部分指标(如精度0.1%-0.2%FS)已接近或超越国际水平,但串扰控制(普遍1%-3%FS)仍存差距。日本OnRobot及部分国内品牌(鑫拓诚、海伯森)参数相对宽松(精度1%-3%),面向中低端市场。
产业链下游来看。2023年,六维力传感器主要应用于工业自动化领域,人形机器人未来有望成为六维传感器最大增长需求。据睿工业报告,2023年,六维力传感器主要应用于工业自动化领域高柔性化产线的需求不断增长,尤其在机器人打磨和装配等场景中不可或缺,但受限于工艺,难以大批量使用。汽车领域应用成熟,缺乏新场景,增量有限。人形机器人是六维力传感器最大增长来源,随着其量产和应用,六维力传感器出货量将大幅提升。此外,军工、航空航天、医疗等领域对成本敏感度低,价格较高,增量稳定。
3、方案探索:六维力传感器渗透率有望持续提高
六维力传感器在人形机器人领域的重要性逐渐凸显。人形机器人的复杂运动涉及多个关节,算法解耦难度大,尤其在复杂场景的末端力控方面,如复合装配,即使是特斯拉也可能面临算法难点,且复杂算法可能拖累响应速度,导致机器人运动卡顿。因此,随着六维力传感器成本下降,特斯拉加大使用六维力传感器的可能性增加。目前,六维力传感器在协作机器人中的渗透率约为25%,人形机器人由于算法积淀尚不成熟,对六维力传感器的依赖度更高,其未来渗透率可能高于协作机器人。
当前人形机器人厂商的力控方案尚未收敛,各家差异较大。大部分人形机器人厂商关节处普遍搭载一维力/力矩传感器,部分在手/脚腕处搭载六维力传感器,部分厂商还附加手指触觉传感器。总结来看,搭载六维力传感器的企业渗透率约20-30%。例如,优必选WalkerS1、开普勒K2等将六维力传感器部署于工业场景的人形机器人手腕和脚踝处,用于实现动态平衡和精细抓取操作;智元、本田、特斯拉则在交互服务类人形机器人手掌处搭载指尖触觉传感器,侧重交互反馈。
4、工艺探索:自动化贴片与自动化标定是降本的核心
串扰、精度及准度为六维力传感器衡量性能的重要指标。串扰指标用来衡量多维力传感器各测量方向间的耦合影响。精度和准度描述六维力传感器具体的测量误差水平。
六维力传感器生产过程存在三大技术难点。1)弹性体加工:针对每个场景进行非标设计,弹性体加工需综合考虑轴间干扰、结构解耦、形变敏感性等,对于材料选择、结构设计及加工制造过程均有较高要求。2)贴片:当前贴片环节依赖人工,在弹性体的每个应变梁处进行精密贴片,如果贴片出现误差,对良率的影响较大。据高工机器人,应变片的生产特点之一在于需大批量生产才能覆盖单次的启动成本,并包含大量专业生产步骤,尤其是高精度贴片、温度补偿等环节。3)标定检测:六维力传感器的标定样本空间含531441个样本点,是一维力传感器难度的6次方,需要借助专用标定设备通过解耦算法极力降低串扰,提升准度和精度。
提高良率与规模化是降本的核心。可行的降本路线或存在:1)材料利用率提升,提高后续环节良率以减少对于弹性体等材料的浪费;2)加工工艺优化,贴片环节与标定测试环节由人工向自动化发展或大幅提高良率,降低成本,目前柯力传感、凌云股份等均尝试自动化标定与自动化贴片;3)规模化降低设计和研发成本。
5、市场预测:从万元级到千元级,千亿赛道蓄势待发
特斯拉人形机器人需要使用28个一维力/力矩传感器与4个六维力传感器。目前人形机器人中每个旋转关节需要1个力矩传感器,每个直线关节需要1个力传感器,而六维力传感器主要用于手腕(共2个)和脚踝(共2个)等关键部位。根据TeslaAIDay,特斯拉机器人拥有14个线性关节与14个旋转关节,因此需要14个力传感器与14个力矩传感器,手腕与脚踝共需要4个六维力传感器。
六维力传感器生产技术难度大、生产效率低,目前外资品牌六维力传感器单价在5~8万元,国产六维力传感器零售价1.5-3万元。根据前瞻产业研究院数据,2023年力传感器在人形机器人零部件中价值量占比16%,预计2030年占比降至11%(根据特斯拉CEO马斯克观点,特斯拉机器人售价将为2-3万美元,则对应的力传感器成本不会超过2000-3000美元,即1.5-2.2万元),降价空间巨大。预计单个六维力传感器终局成本有望达到千元级。
中性测算下,2025年全球人形机器人力传感器市场规模15.9亿元,2030年达到271.0亿元,2035年达到505.8亿元,2025~2035年CAGR约41.3%。
6、技术趋势:新型结构&智能补偿,向高精度出发
力传感器正持续向高精度化、轻量化与AI智能化方向发展,以满足人形机器人、精密医疗等领域对更高精度(0.05%FS级)、更低串扰(<0.5%FS)的迫切需求。
新型弹性体结构设计助力动态响应精度提高。在高精度解耦方面,传统力传感器受多维力测量时串扰影响,且温度漂移和长期稳定性不足,尤其在复杂工况下误差可能进一步放大。针对这一问题,行业正通过新型弹性体结构设计(如空心梁、柔性铰链)来优化动态响应精度。
轻量化设计提高力传感器灵活性与过载能力。新一代传感器采用钛合金、碳纤维等先进材料提升抗过载能力,并通过金属3D打印技术实现复杂结构的一体化成型。根据铂力特公告,2024年华力创科学推出全球最小的六维力传感器之一PhotonFinger,采用轻量化先进材料,使量程和过载能力提升50%-250%。

融合智能算法,实现误差补偿。通过AI算法实现力控自主化,使六维力传感器具备自校准和环境补偿能力,实现误差补偿。例如,海伯森在HPS-FT系列六维力传感器内部集成高精度的温度补偿算法,确保传感器在不同温度下输出稳定,减少温度漂移对测量精度的影响。
04
触觉传感器:技术路线多样,国产化进程加快
1、电子皮肤:多模态感知融合,柔性触觉传感重要应用
触觉是人体重要的感知功能,人体的触觉感知功能多样且复杂。触觉作为人类感知系统的核心组成部分,通过皮肤中多类特异性感受器协同工作实现复杂的环境交互。
触觉传感器是实现人形机器人环境感知与精确操作控制的核心组件。触觉传感器通过感知外界压力、振动、触摸等物理接触信号并将其转换为电信号,其组成部分包括电极、敏感材料和导电材料等。触觉传感器受光照、烟雾、遮挡等限制较小,能够更加准确地感知物体的位置和表面属性,为人机交互和自动化系统提供了重要的信息输入手段。
柔性触觉传感器和刚性触觉传感器的差异主要体现在材料端。按照物理性质和形态,触觉传感器可分刚性(MEMS为主)和柔性两大类,刚性传感器主要聚焦指尖精准操作,感知压力、硬度;柔性传感器则和人类皮肤一样可以弯曲,覆盖全身。两者技术原理均包括压阻式、电容式等,但柔性传感器由于使用柔性材料制作,能够像人类皮肤一样感知外界的信息,具备高灵敏度、高柔韧性,响应速度快、延展性高甚至可自由弯曲。
柔性化为触觉发展新方向,电子皮肤成为重要应用。柔性触觉传感器囊括了法向力、剪切力、温度等更多维度,能够扩展可感知的信息,柔性触觉传感器集成信号处理电路、算法等模块形成电子皮肤。电子皮肤类似人类皮肤,对物体轮廓、接触面积及各部位压力感知更丰富,获取的是类似图像信息,非简单标量。能够认为,电子皮肤较传统触觉传感器不仅在感知维度上更加丰富,还能够提供更加细腻、精准的感知反馈,不断趋近人类皮肤的功能,在日益复杂、精细的交互场景中发挥更大的作用,有望成为触觉传感器的终局形态。
2、技术路径:多种技术路线,精度&稳定性&成本面临挑战
压阻式、电容式、光电式与电磁式的柔性触觉传感器已经落地应用,压阻与电容为主流技术路线。
柔性触觉传感器在高精度检测、长期稳定性和成本控制方面面临多重挑战,多功能柔性触觉传感技术仍是国内“卡脖子”技术。(1)高精度检测:难点在于如何在不同环境条件下保持传感器的稳定性和准确性。(2)长期稳定性和可靠性:柔性触觉传感器商业化应用的关键瓶颈,传感器需在高温、湿度变化和持续机械应力等条件下长时间工作,而材料老化等问题可能导致数据不准确。(3)生产成本较高,限制了柔性触觉传感器的大规模应用。(4)当前的研究成果仍不足以覆盖人体皮肤触觉感知的全部功能。
3、工艺探索:电子皮肤包含基底层、传感器层、封装层
电子皮肤核心构成可大致分为三层结构:基底层、传感器层和保护封装层。

电子皮肤融合先进的材料科学、微电子工程和传感器技术。电子皮肤的大致制造流程为:基底准备、电子元件集成、电路设计、制造电子元件、装配和封装、连接和集成、测试和标定。当前,电子皮肤在材料与制备工艺上还存在诸多突破难点。
基底层——材料高进口依赖:基底层行业普遍采用聚酰亚胺(PI)、聚二甲基硅氧烷(PDMS)等柔性高分子作为基底材料,并搭配碳纳米管、石墨烯或银纳米线等导电材料,以确保材料兼具良好的导电性和柔韧性,而目前高性能材料如高导电率银纳米线(美国Cambrios垄断),石墨烯(日本东丽主导)均对进口有强依赖。
传感器层——关键传感技术:柔性触觉传感器作为电子皮肤中最重要的传感元件之一,其高端产能被外国垄断,市场格局较为集中,根据华经产业研究院,2022年全球排名TOP5厂商包括Novasentis、Tekscan、JapanDisplayInc.(JDI)、Baumer、Fraba,合占57.1%市场份额;国内企业大都处于早期,多功能柔性触觉传感技术仍是国内关键技术。
保护封装层——动态环境耐久性:电子皮肤在人形机器人应用中需要承受反复拉伸和弯折,现有封装材料PDMS等在长期使用后容易出现老化开裂现象。根据IDTechEx的报告,目前电子皮肤的测试标准要求至少通过10万次弯折测试,这对材料耐久性提出了严苛要求。
4、产业链:上游柔性基底材料决定电子皮肤性能差异
电子皮肤产业链以上游材料为核心。电子皮肤的上游主要为基底材料,以及碳材料、无机半导体材料等功能材料,材料端直接决定产品的性能和成本;中游为电子皮肤的生产制造商,通过微纳加工、3D打印等工艺将材料转化为传感器,并集成多模态感知模块;下游应用领域主要包括消费电子(智能穿戴触控)、医疗(手术机器人)、汽车(智能座舱)、机器人(灵巧手抓取)等。
上游原材料与芯片在电子皮肤成本中占比最高。电子皮肤既需感知压力、温度、湿度等信息,又需具备柔软、可折叠、自修复等特质,因此传感技术和良好的生物材料是行业主要壁垒。根据头豹研究院数据,芯片在电子皮肤成本中占比30%,其次为其他原材料占比25%。原材料中,柔性基材决定电子皮肤弹性性能,介电材料影响传感器灵敏度和稳定性,活性材料准确传递外界刺激点。
柔性基材是决定人形机器人电子皮肤性能的关键因素和主要壁垒,使其具备较好的拉伸性能和延展性能。目前常用于人形机器人电子皮肤的柔性基材主要是聚二甲基硅氧烷(PDMS),而随着柔性基材研究深入,聚酰亚胺逐渐被公认为是柔性电子传感器件的优选基底材料,但成本较高,难以规模化生产。
中游,柔性触觉传感器行业技术壁垒相对较高,市场格局较为集中,高端产能被外国占据。根据中商情报网,2022年全球电子皮肤市场TOP5厂商合计占有大约57.1%的市场份额。
柔性触觉传感技术国产化进程加快。目前,国内柔性触觉传感技术仍处于早期布局阶段,面临技术和市场的双重挑战。尽管汉威科技、力感科技等多家公司已开始在柔性传感器领域布局,但多功能柔性触觉传感技术仍是国内亟待突破的关键技术。随着人形机器人需求的增长,预计将推动国产品牌技术的快速进步,国内厂商也将逐步跟上传感器产业的发展趋势。观研天下数据显示,2022年中国柔性触觉传感器的国产化率为32.5%,预计到2027年提升至41%。
5、市场预测:全球柔性触觉传感器与人形机器人触觉传感器市场增长态势分析
根据Precedence Research数据,预计2034年全球柔性触觉传感器市场规模将达到310.6亿美元。

中性测算下,2025年全球人形机器人触觉传感器市场规模1.24亿元,2030年达到60.24亿元,2035年达到133.88亿元,2025-2035年CAGR为59.7%。
05
IMU:人形机器人姿态控制核心
1、IMU分类:人形机器人精度要求相对较低,MEMS渗透率有望提升
IMU(Inertial Measurement Unit),惯性测量单元,是人形机器人姿态控制的核心。IMU是测量物体三轴角速度以及加速率的装置,被广泛应用于人形机器人的躯干、关节、胯部等部分,为机器人的运动控制提供精确的数据支持。IMU传感器核心部件包括加速度和陀螺仪,有时还有磁力计。
按精度分,惯导可以分为战略级、导航级、战术级、消费级几个层次。战略级IMU的稳定性与精度最高、技术最为复杂、成本亦较为高昂,多用于航天、航海以及国防领域;导航级IMU次之,多用于航空与长航时无人系统;战术级IMU再次之,能够应用于非国防领域,例如高端工业(测绘、勘探)、汽车(自动驾驶“IMU+GNSS全球导航卫星系统”方案)等;消费级IMU的性能指标最弱但具有成本优势,在智能手机、可穿戴设备、游戏手柄等消费电子领域广泛应用。
MEMS成为惯性传感领域主要的技术路线。按照技术路线分,惯导可分为MEMS、光纤、激光等,根据智研咨询,2023年我国激光惯导系统、光纤惯导系统、MEMS及其他系统市场规模占比分别约为30.8%/32.3%/36.9%,目前分布较为平均。但是,对比来看,光纤惯导动态范围宽,启动时间短,适合战术级应用和恶劣环境,成本较高;激光惯导精度高,但体积大,成本更高昂,多用于航天航空领域。相比之下,MEMS技术小型化、轻量化、易于批量化生产的优势尤为明显,逐步成为人形机器人惯性传感器领域主流技术路线。
2、产业链及竞争格局:上游陀螺仪和加速度计对精度起到决定性作用
惯性导航系统产业链上游为惯性器件及其他元器件供应商,包括陀螺仪供应商和加速度计供应商;产业链中游参与主体是INS模块生产企业、GNSS模块生产企业及惯性组合导航系统集成商;产业链下游参与者为航天航空、车辆、消费电子、自动驾驶等相关行业企业。
惯性器件层对惯性导航系统起到决定性作用,且其技术门槛高,是产业链的核心部分。陀螺仪用于测量角速度,确定物体的姿态和航向,其难点在于克服零偏稳定性、温度漂移等误差;加速度计则通过检测比力来推算线加速度,但易受振动、安装误差等因素干扰,高精度校准是关键挑战。当前,MEMS工艺的进步正推动陀螺仪和加速度计向小型化、低成本方向发展,但航天航空级高精度器件仍被国外巨头垄断,国产替代需突破材料、工艺和算法等多环节瓶颈。

外资企业主导市场,国内厂商仍需发展。MEMS惯性技术经二十多年的发展已经进入成熟应用,海外厂商具备先发优势,国产产品定位误差、陀螺零偏、加速度计零偏等领域均与国外头部企业存在差距。根据微纳制造产业促进会,2023年高端惯性传感器市场市占率前三的厂商分别为霍尼韦尔、Northrop Grumman和Safran,CR3达到67%;根据芯谋研究数据,2022年我国MEMS IMU市占率前五的厂商均为国际头部厂商,本土龙头矽睿科技市占率仅2%。

3、工艺探索:芯片制造&模组组装为核心技术壁垒
MEMS IMU的生产流程主要包括MEMS芯片制造、传感器模组组装、校准与测试、系统集成等关键环节,涉及半导体工艺、精密封装、高精度标定等技术。
MEMS芯片制造:利用半导体工艺在晶圆上制造微机械结构,包括光刻、刻蚀、薄膜沉积和深硅刻蚀等步骤,随后进行ASIC芯片设计与集成。
传感器模组组装:将MEMS芯片与ASIC芯片通过金线键合或倒装焊技术连接,并进行封装,实现多轴传感器的集成。
校准与测试:对IMU进行静态和动态标定,以及温循和可靠性测试,确保传感器的精度和稳定性。
系统集成:将校准后的IMU与其它传感器和系统组件结合,通过数据融合算法实现多传感器信息的整合,以适配特定应用需求。
芯片设计制造和模组组装是技术壁垒最高、附加值最大的核心环节。
上游芯片制造是MEMS IMU技术研发的核心,每一高性能MEMS惯性传感器,均包含一颗微机械(MEMS)芯片和一颗专用控制电路(ASIC)芯片,其性能高低直接决定惯性系统的整体表现。该领域核心技术目前为海外厂商占主导,包括霍尼韦尔、TDK、ST、Silicon Sensing等。国内,芯动联科是唯一能够生产高精度MEMS传感器的国内厂商,此外正在布局自动驾驶L3级以及以上所需的IMU芯片的厂商还包括上海砂睿科技、深圳深迪半导体等。
在组装环节,将MEMS芯片、ASIC封装为完整IMU模组,核心挑战在于封装工艺和校准技术。海外霍尼韦尔、赛峰集团等掌握航天航空级气密封装技术,用于校准与测试的高精度转台、振动台(补偿零偏和温漂)等设备被欧美厂商垄断,国内企业正加速封装技术研发并降低对硬件校准的依赖。
4、应用方向:主流厂商应用渗透率较高,单体数量有望提升
人形机器人厂商加大惯性导航系统应用。IMU对于机器人的必要性主要体现在三个方面,定位、姿态平衡和感知反馈,是其姿态控制的核心。目前,大部分人形机器人主流厂商均有明确对IMU的应用,国内多家机器人厂商如宇树、优必选、智元等,也在其最新方案中增加了IMU的使用;能够认为,消费级IMU+主控的应用量有望持续提升。
5、市场预测:十年CAGR65%,2035年市场规模将超74亿
IMU市场份额高度集中,全球MEMS IMU市场CR5约93%。IMU技术,特别是其核心的MEMS(微机电系统)技术,拥有极高的技术壁垒和工艺门槛。经过数十年的发展,市场份额高度集中在几家拥有深厚技术积累和规模化生产能力的国际大厂手中。
中性测算下,2025年人形机器人IMU市场规模达到0.5亿元,2030年可达25.1亿元,2035年可达74.38亿元,2025-2035年CAGR为65.0%。
06
视觉传感器:环境感知的“眼睛”
1、视觉:人形机器人视觉方案较多,2D和3D方案仍未收敛
机器视觉,即视觉传感器技术,是一种利用机器替代人眼进行视觉识别和判断的技术。在工业生产中,机器视觉的引入主要目的是提高生产效率、降低误差率、减少成本,并将人力从重复性高或危险的工作环境中解放出来。根据图像数据的维度,机器视觉在工业中的应用主要分为二维(2D)和三维(3D)两大类,其核心功能包括物体识别、尺寸测量、精确定位以及质量检测等。其中,识别功能相对容易实现,而检测功能则更具挑战性。
二维(2D)技术主要用于获取平面图像,三维(3D)技术能够提供更全面的物体信息,并在二维空间内对目标进行定位和识别。二维(2D)技术主要用于获取平面图像,然而,2D技术无法提供物体的三维信息,例如高度和体积,且对光照条件和物体运动较为敏感,容易受到干扰。相比之下,三维(3D)技术能够提供更全面的物体信息,并在三维空间内实现目标的精确定位,从而支持更复杂的功能,如人脸识别、三维建模和复杂结构的检测。尽管3D技术在数据处理和存储方面仍面临一些挑战,但其在许多应用场景中展现出独特的优势,能够满足更高精度和更复杂任务的需求。
3D视觉发展趋势较为明确。面对高度复杂、高度变化的环境,能够认为3D视觉相比2D视觉可获取空间坐标信息,帮助具身智能更好地执行各类复杂操作,在人形机器人中有望广泛应用。3D成像技术具体分类来看,立体视觉方案使用双摄像头模拟人眼视差,中等距离适用,成本低但软件复杂;ToF技术用红外光测距,响应快、范围广,低光性能强;结构光编码投影高精度,强光性能一般,且校准成本高;激光三角法超高精度但范围小,适合工业检测。目前结构光、ToF和双目立体视觉销量占比之和超90%。
“摄像头+雷达”是人形机器人常见的视觉方案。激光雷达利用激光实现精确测距,在感知算法尚未成熟的早期阶段的优势更为凸显。激光雷达在当前人形机器人的应用中仅次于摄像头,宇树科技、Agility、智元机器人等均采用“摄像头+激光雷达”的方案。此外,毫米波雷达、超声波雷达、红外传感器的配备可进一步完善了人形机器人的视觉感知,例如超声波雷达有显著的成本优势,红外传感器弥补了摄像头在暗光条件下的感知盲区。

当前主流人形机器人厂商的视觉感知技术主要分为两大技术路线。
2D视觉:特斯拉在自动驾驶系统中开创性地构建了BEV视角下的Transformer神经网络架构,配合Occupancy Network(占据网络)算法,仅需配置2D摄像头即可实现3D的环境感知。这种技术范式已被成功迁移到人形机器人领域,包括特斯拉Optimus和Figure01等产品,都采用"多摄像头阵列+大模型算法"的解决方案来实现环境感知。
3D视觉:融合立体视觉、结构光、ToF以及激光三角法等多种3D视觉成像技术,通过配备RGB-D深度相机直接获取距离信息。相比纯2D视觉方案,这种方法减少了算法依赖,实现难度相对较小。目前,宇树科技、优必选、Agility Robotics、智元机器人等厂商都选择了这一技术路径。
2、产业链:整体技术较为成熟,上游图像传感器仍主要以外资品牌为主
视觉传感器产业链上游主要包括光源设备、镜头、工业相机、图像采集卡等零部件,以及视觉软件及算法;中游是设备制造和系统集成环节;下游则是各类终端应用市场,包括消费电子、半导体、汽车、机器人、工业检测等。从成本构成的角度来看,硬件(如光源、镜头、相机等)成本占比较大,约45%,其次,软件开发是产业链的重要环节,占机器视觉系统成本的35%左右。
图像传感器、处理器为上游主要部件,市场呈现"一超多强"的竞争态势。图像传感器是摄像头系统中将光信号转换为电信号的核心元件,主要分为CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)两种类型,其中CMOS图像传感器(CIS)凭借低功耗、高集成度和低成本优势,成为主流应用。索尼长期占据CIS市场龙头地位,在车载CIS细分市场,据ICVTank数据显示,2023年全球汽车CIS市场中安森美、豪威科技分别占据48%、28%,汽车场景在耐高温、防碰撞等指标上与人形机器人领域更为相似,能够认为或可一定程度上反映具身智能图像传感器市场竞争格局。
3、市场预测:中国机器视觉市场“冷热不均”,人形机器人开启百亿新赛道
根据高工机器人产业研究院数据,2024年中国机器视觉市场规模181.47亿元,同比下滑1.97%。其中,2D视觉市场规模约为153.32亿元,同比下滑5.07%,3D视觉市场约为28.15亿元,同比增长19.18%。高工机器人产业研究院预测,2025年中国机器视觉市场规模有望突破210亿元,同比增速超14%。

中性测算下,2025年人形机器人视觉传感器市场规模达到0.91亿元,2030年可达45.18亿元,2035年可达133.88亿元,2025-2035年CAGR为64.7%。
07
行业市场规模预测
传感器在人形机器人中价值量约22.4%。以特斯拉Optimus为例,预计一台人形机器人需要4个六维力传感器、14个一维力传感器、14个力矩传感器、10个触觉传感器、2个IMU传感器、2个视觉传感器,测算价值量合计约为8.96万元,按照人形机器人40万元/台BOM成本测算价值占比约22.4%。
市场规模:根据前文分类别中性测算,预计2035年人形机器人传感器市场规模达到约848亿元,2025-2035年CAGR约46.6%。
08
相关公司
1、汉威科技:与多家人形机器人本体厂商展开合作
汉威科技兼具电子皮肤制造与产品经验。在具身智能领域,汉威积累了丰富的传感器产品储备,例如:柔性触觉传感器、惯性测量单元、MEMS压力应变片、气味嗅觉传感器(电子鼻)等,目前已构建起覆盖“触觉-平衡-力控-嗅觉”的多维产品矩阵,为机器人智能化发展提供了多种感知解决方案;目前,公司柔性电子皮肤产品与多家人形机器人本体厂商展开合作,同时已经向部分机器人厂家进行小批量供货。2024年,公司凭借在柔性电子领域的技术优势,参与起草并制定了国内首个柔性电子行业标准,进一步巩固了行业领先地位。在医养方面,公司积极开发新产品,丰富产品线,逐步开始量产。在智能医疗器械和智能可穿戴方面,公司布局的非接触式睡眠监测产品、智能打鼾干预产品等已实现规模化生产,公司新研发的智能汗液检测仪已经通过功能测试,能有效监测人体运动状态。此外,为满足日益增长的市场需求,苏州能斯达正在积极推进新自动化产线的扩建工作,进一步提高公司生产效率,为公司未来业务拓展和市场份额提升提供强有力的产能保障。

2、福莱新材:电子皮肤二代产品延展至三维力,战略合作兆威机电
第二代电子皮肤产品延展至三维力,战略合作兆威机电。福莱新材前沿布局人形机器人电子皮肤,2025年6月福莱新材已经发布机器人灵巧手第二代产品,2025年7月福莱新材与兆威机电签署战略合作备忘录。
第二代传感器能够实现“全曲面”覆盖,在机器人灵巧手上可完整部署于指尖、指腹、手心、手背等关键区域,达成全域触觉感知,极大扩展了机器人的有效感知范围和环境适应性。
“三维力”矢量感知能力的实现。新品超越了第一代产品单一垂直力检测的局限,能够精准捕捉和解析多方向的作用力,包括垂直力和剪切力等,感知力的大小和方向信息。这项能力对于机器人实现精细、灵巧的操作至关重要,为其在复杂交互场景中提供了更丰富、更精确的触觉数据基础。
在材料方面,采用分子层面优化的复合传感材料提升灵敏度和可靠性,并应用仿生表面硅胶模拟人类皮肤结构与微观纹理,提升接触稳定性和抓取成功率。在算法方面,运用深度学习触觉识别与多模态感知数据融合技术,实现高维特征实时提取与异构信号的智能整合,大幅提升感知精度。
3、柯力传感:力传感器龙头,布局“传感器森林”
传感器龙头,构建工业物联体系。公司深耕传感器和工业物联网领域,形成智能工业测控与计量、智慧物流设备、能源环境设备测量、机器人传感器等四大版块的业态布局。目前公司已涉足称重、光电、水质、光纤测温、光幕、气体、位移、电量、温湿度压力、流量、3D视觉、激光测距、振动传感器、机器人多维力传感器等近二十种传感器,并拓展在智慧物流、智能库房、矿井物探、建筑机械物联网、无人值守、冶金化工、新能源自动化装备、食品自动化装备生产线等不同工业物联网应用场景,构建软件开发平台、大数据平台、芯片解决方案平台、产业大脑、产业园等产业平台体系。截至2024年底,柯力集团打造的“传感器森林”的战略投资布局初见雏形。
六维力/力矩传感器已给多个客户送样,部分客户进入批量订单阶段。公司瞄准新趋势、新产业、新客户、新需求,“以市场为师”,围绕六维力传感器、机器人关节力/力矩传感器、触觉传感器、多物理量传感器方向全面推进“新四样”传感器发展。公司六维力/力矩传感器已完成人形机器人手腕、脚腕,工业臂、协作臂末端的产品系列开发,掌握了结构解耦、算法解耦、高速采样通讯等技术要点,并已给50多家国内人形机器人、协作机器人、工业机器人客户送样,部分客户已进入批量订单阶段。
4、安培龙:横向拓展力传感器,产品&客户开拓迅速
国产车规级传感器领军者。公司以热敏电阻起家,深耕传感器二十余年,纵横向并举拓展产品、客户与下游应用领域,形成温度、压力、氧、力四大传感器产品矩阵。
力传感器聚焦高价值场景:公司基于MEMS硅基应变片+玻璃微熔工艺的EMB刹车力传感器已进入国内头部车企装车试验;公司用于机器人力传感器包括单向力传感器、力矩传感器以及六维力传感器,基于MEMS硅基半导体应变片+玻璃微熔工艺的单向力传感器以及力矩传感器已开发完成,已给多家机器人客户进行送样。基于MEMS硅基半导体应变片+玻璃微熔工艺六维力传感器目前正在研发及客户技术交流过程中,有望在工业自动化场景实现突破。

5、凌云股份:主业稳健增长,六维力传感器项目助力海外市场拓展
公司主业稳健增长,海外市场拓展顺利。凌云工业股份有限公司成立于1995年,聚焦汽车轻量化系统、低排放汽车管路系统和市政工程管道系统三大核心领域。
联合科研机构成立六维力传感器项目组。2023年,凌云股份联合中国科学院合肥物质科学研究院和中兵智能创新研究院揭榜国家六维力传感器技术,旨在突破高精度、低成本、智能化的六维力传感器关键技术,推动其在人形机器人等领域的产业化应用。根据官方公众号,中国科学院合肥物质院智能所于1991年研制出我国第一台六维腕力传感器,并已经实现深海、航空航天、人形机器人等多项任务的传感器标定工作,在六维力传感上具备技术领先性。根据公司公告,凌云股份在涿州已经开始建设年产约3千力传感器产品的产线。

6、芯动联科:MEMS惯性传感器领域业内领先
芯动联科主营业务是高性能硅基MEMS惯性传感器的研发、测试与销售。公司的主要产品是MEMS陀螺仪、MEMS加速度计、惯性测量单元、技术服务,目前已形成自主知识产权的高性能MEMS惯性传感器产品体系并批量生产及应用,在MEMS惯性传感器芯片设计、MEMS工艺方案开发、封装与测试等主要环节形成了技术闭环,建立了完整的业务流程和供应链体系。
公司高性能MEMS陀螺仪核心性能指标已达到国际先进水平,产品实现了批量化应用。公司专注于从事产品的研发,获得“国家专精特新‘小巨人’企业”、“高新技术企业”等荣誉称号。
7、奥比中光:卡位3D视觉传感器
国内3D视觉领军者,具身智能有望打开增长新通道。公司是国内3D视觉领先企业,成立于2013年,总部位于深圳,2022年7月在科创板上市。公司主营业务是3D视觉感知产品的设计、研发、生产和销售,拥有包括结构光、iToF、dToF、双目、Lidar、工业三维测量在内的完整技术体系,具备极强的行业know-how,产品性能对标国际巨头。公司致力于构建机器人与AI视觉产业中台,打造机器人的“眼睛”,根据公司官网信息,公司机器人视觉业务在中国服务机器人市场占有率超过70%。
公司构建了“全栈式技术研发能力+全领域技术路线布局”的3D视觉感知技术体系,是市场上为数不多能够提供全套自主知识产权3D视觉感知产品的企业。公司抓紧具身智能历史性机遇,推出Femto系列iToF深度相机、Gemini335/336系列结构光深度相机以及MS600激光雷达等多款产品,支持各类型机器人在室内外复杂场景下执行视觉应用,为迎接具身智能市场需求的爆发做好充分准备。此外,三维扫描也是公司重点发展方向之一,公司携手创想三维,2024年取得突破性进展,未来随着市场的持续开拓,三维扫描有望成为公司重要的增长点。
8、奥普特:机器视觉应用技术领先者
领跑机器视觉领域,工业自动化+智能机器人双轨发展。奥普特是机器视觉核心零部件龙头,技术与产品生态涵盖传统机器视觉与具身智能领域,机器视觉核心部件贡献近九成营收,毛利率超60%。公司持续加大研发投入,连续2年高于2亿元,研发费用占比达20%以上,高于行业平均。2025年4月公司发布股权激励,彰显公司增长信心。公司于2025年6月18日正式提出工业自动化与智能机器人双轨发展战略,加速推动AI质检落地及推出多款具身智能产品。
“视觉、运控”双轮驱动,加速布局人形机器人。公司推出多款3D相机产品,收购运控企业东莞泰莱,以“视觉、运控”双轮驱动布局人形机器人。公司人形视觉3D相机产品包括线激光、投影结构光、散斑结构光、TOF相机。东莞泰莱深耕精密传动领域,将与公司业务深度协同,目前关节模组已送样,未来将在与人形机器人相关的空心杯电机、无框力矩电机等领域加大投入。
09
参考研报
1.兴业证券-机械行业人形机器人系列深度报告(三):机器人实现智能层级跃迁的硬件基石——传感器
2.湘财证券-机器人行业深度:传感器,人形机器人与外界互动核心零部件
3.财信证券-可转债主题研究系列(五):人形机器人产业进程加速,中长期市场空间广阔
4.东北证券-机械设备行业:电子皮肤百亿市场,算法+工艺+渠道构造壁垒
5.光大证券-安培龙-301413-首次覆盖报告:传感器国产替代龙头,战略发展机器人用力传感器
6.华金证券-汽车行业人形机器人系列报告(一):六维力传感器市场加速扩容,国产替代机遇与挑战并存
7.平安证券-奥比中光-688322-3D视觉行业翘楚,具身智能助力成长
查看全文




评论0条评论